PhD projects
RNN Approximation Theory
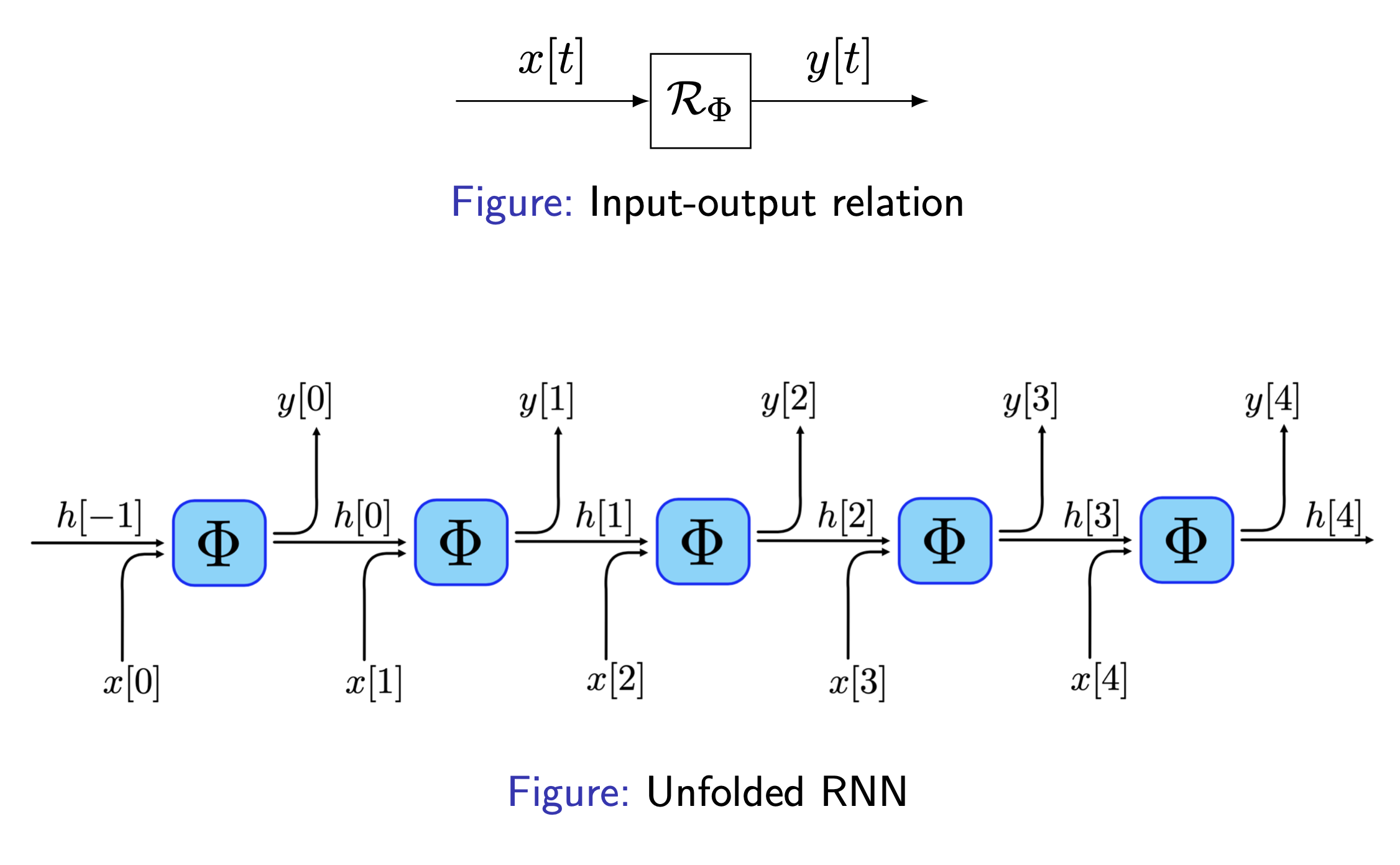
We study the approximation qualities of recurrent neural networks (RNNs) for a variety of tasks in terms of their description complexity. Concretely, we show that RNNs are information optimal for approximating a variety of sequence-to-sequence maps, i.e. no other approximation method can achieve the same error using fundamentally fewer bits.
- Metric-Entropy limits on nonlinear dynamical system learning. Y. Pan, C. Hutter, and H. Bölcskei, Information Theory, Probability and Statistical Learning: A Festschrift in Honor of Andrew Barron, Springer, June 2024.
- Metric entropy limits on recurrent neural network learning of linear dynamical systems. C. Hutter, R. Gül, and H. Bölcskei, Applied and Computational Harmonic Analysis, July 2022.
Stroke Recovery
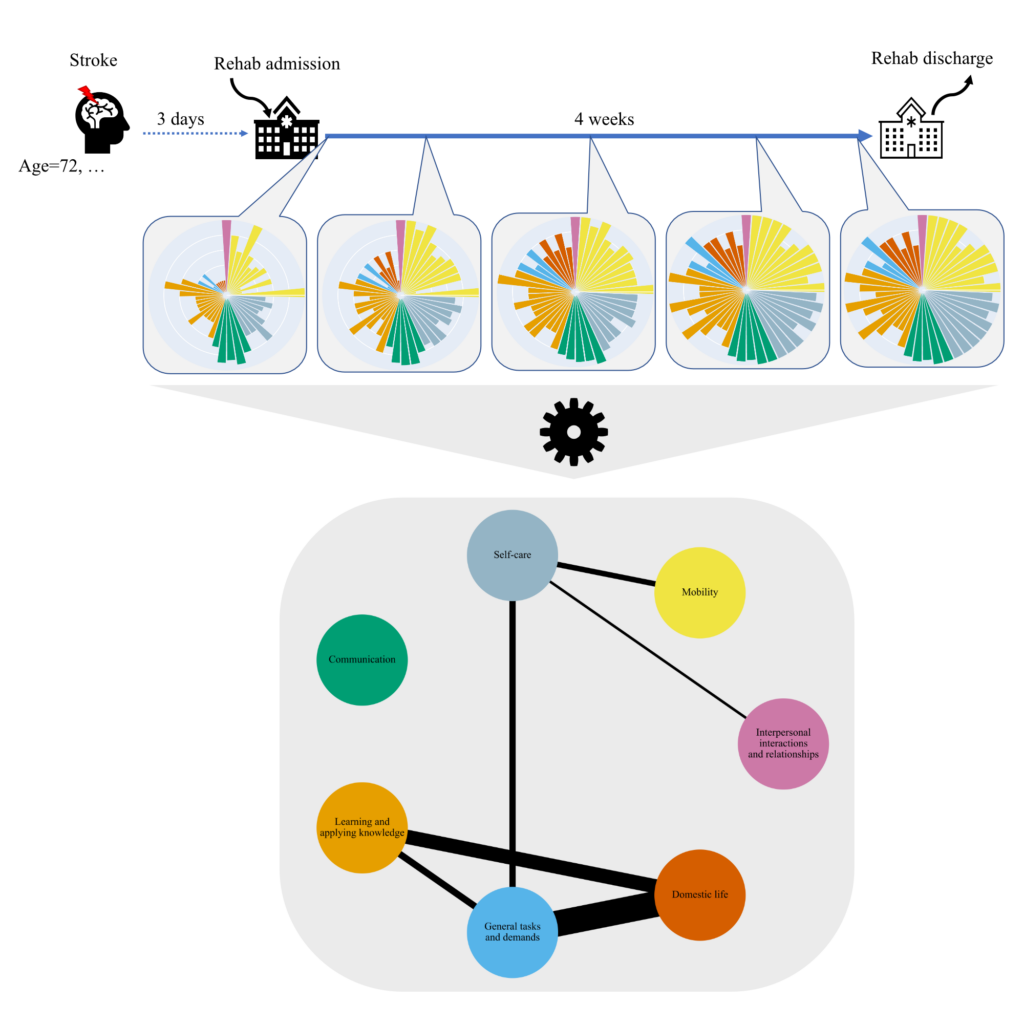
In cooperation with Luzern Hospital, we analyze the rehabilitation of patients recovering after a stroke. Specifically, we derive a graphical model of how performance recovery interacts across domains such as mobility or communication.
- code
- Profiling Daily Life Performance Recovery in the Early Subacute Phase After Stroke Using a Graphical Modeling Approach. Veerbeek, J. M., Hutter, C., Ottiger, B., Micheletti, S., Riedi, S., Bianchi, E., Maaijwee, N., Vanbellingen, T., & Nyffeler, T. Journal of the American Heart Association, 2023.
Other projects
Klassenteiler.de
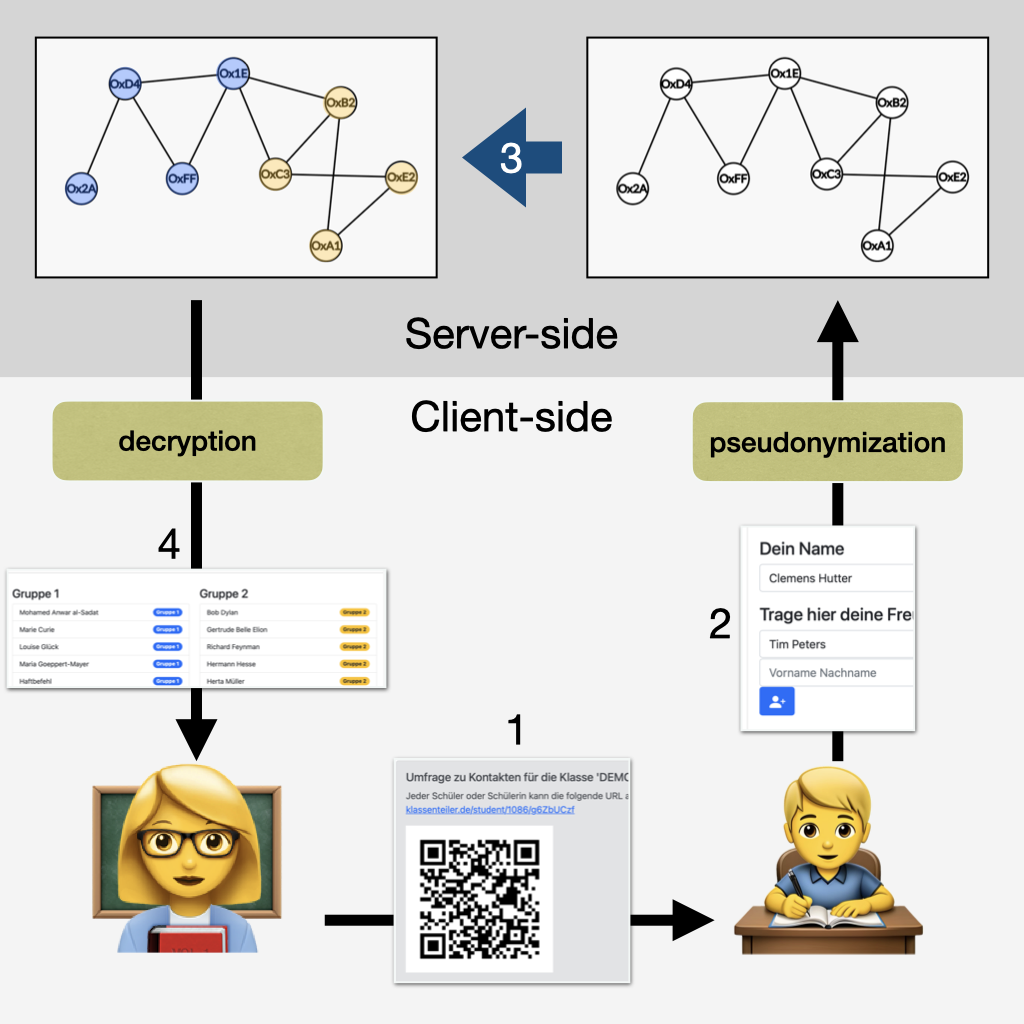
During the COVID pandemic, school classes were split such that only half the students in a class would have in-person lectures on a given day. A simulation study showed that this split should happen along the gaps in the friendship network in order to minimize cross-infection due to out-of-school activities. We developed a web-app to make this practically feasible while maintaining privacy. It was featured on the radio and used by over 5000 students.
- The teacher sends a QR-Code to all the students in a class.
- Each student fills in a form with the names of his friends. Inside the student’s browser, these names are encrypted to generate pseudonyms before being sent to the server.
- The server performs graph-partitioning on the pseudonymized network graph.
- Only the computed split is sent to the teacher. The names are decrypted in the teacher’s browser.
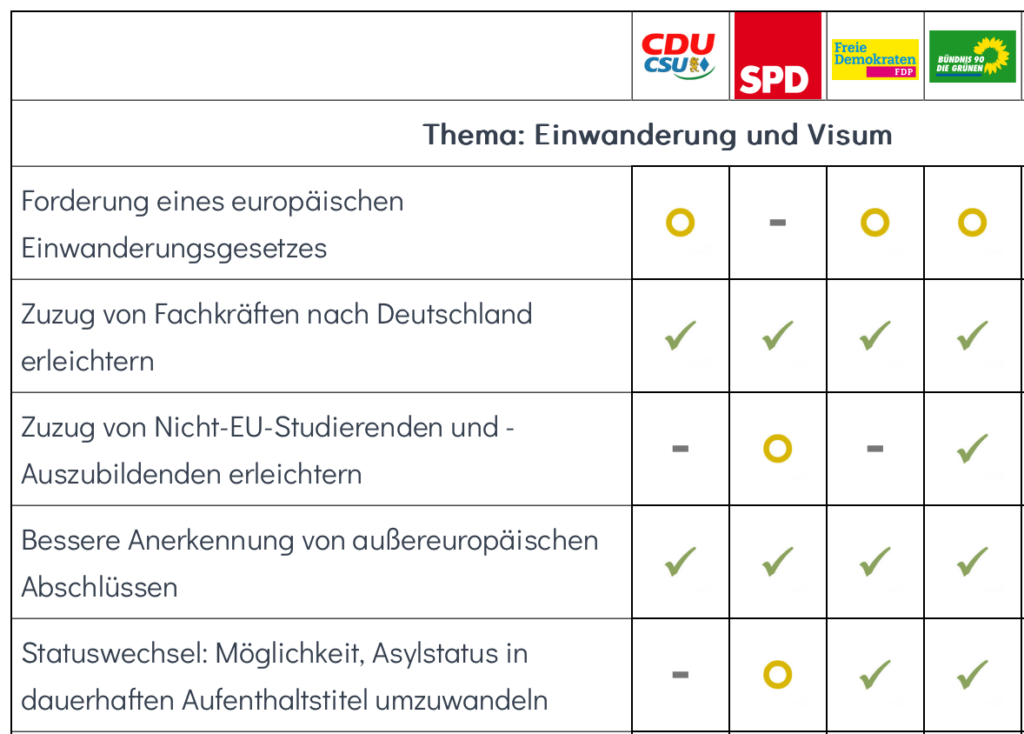
Political Party Comparisons
The NGO https://zugvoegel.org/ regularly publishes comparisons of the positions of political parties before major elections in Germany. I developed some JavaScript that makes it easy for non-technical people to generate and embed interactive tables in their WordPress website.
